
Genoa Port Center, Magazzini del Cotone – Genova: 28 maggio 2019, h. 11:00 Il seminario, organizzato nell’ambito delle attività finanziate dalla Commissione Europea, Affari marittimi, per lo European Maritime Day – EMD (https://ec.europa.eu/maritimeaffairs/maritimeday/en), si terrà in collaborazione tra CNR-INM e Genoa Port Center, e sarà incentrato sulla robotica marina e sulle tecnologie ICT per il …
Marine robotics and ICT technologies for port water monitoring Presso il Genoa Port Center, Magazzini del Cotone, nell’ambito dell’European Maritime Day 2019 – EMD in my Country 2019, lo scorso 28 maggio Massimo Caccia, Senior Researcher presso INM di Genova ha presentato il progetto MATRAC – ACP, con un intervento sulla robotica marina e le …
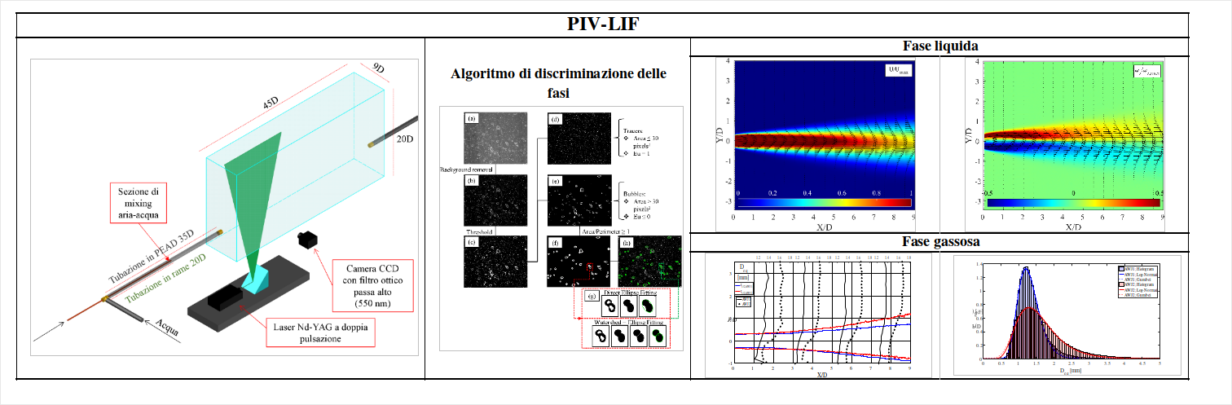
When and where Wednesday 8 May 2019, 14:30, Sala Consiglio, INM HQ Rome Abstract La mia ricerca è finalizzata allo studio dei flussi bifase aria-acqua, allo scopo di fornire una caratterizzazione completa del campo di moto delle due fasi e della geometria e distribuzione delle bolle d’aria. Nel periodo del dottorato di ricerca sono stati …
Enrica Zereik, Ph.D., Researcher at INM Genova, is a component of the Organizing Committee for the workshop on Underwater Robotics Perception, to be held in Montreal, Quebec, May 24th, 2019. Recently, there has been rapid progress in the development of Unmanned Underwater (UUVs) and Remote Operating Vehicles (ROVs), and marine robotics is expected to have …

Roberta Ferretti, Research Fellow at INM Genoa, will attend the General Assembly of the European Geosciences Union in Vienna, and present a paper titled Automatic Posidonia Oceanica monitoring by means of Autonomous Underwater Vehicles to study the effects of anthropogenic impacts on marine ecosystems. [abstract: https://meetingorganizer.copernicus.org/EGU2019/EGU2019-10021.pdf] https://meetingorganizer.copernicus.org/EGU2019/EGU2019-5158-1.pdf https://meetingorganizer.copernicus.org/EGU2019/EGU2019-9429.pdf
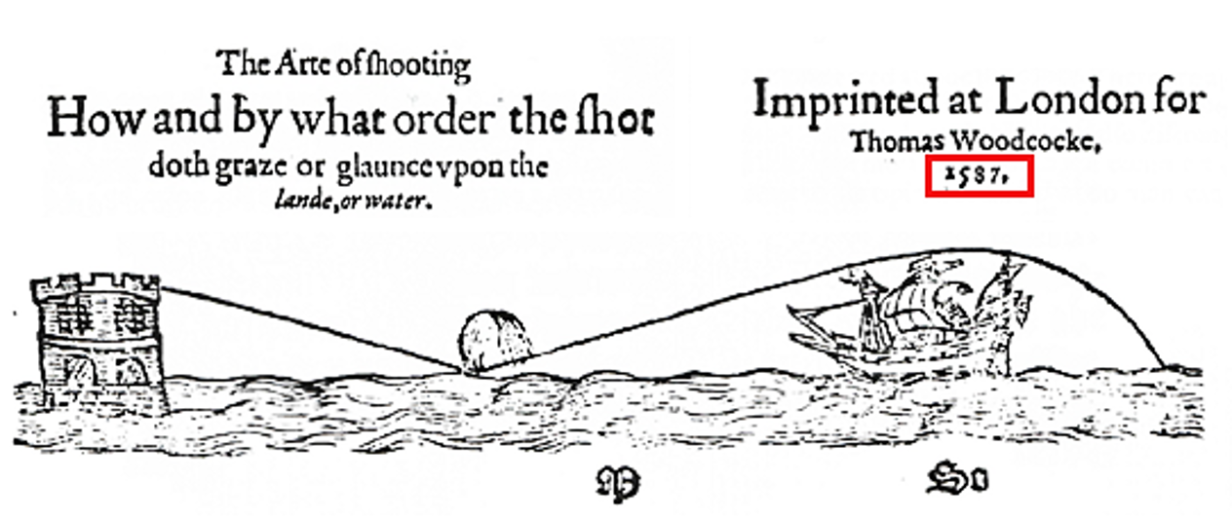
When and where Thursday 18 April 2019, 12:00, Sala Consiglio, INM Rome HQ Abstract First part of the presentation will be about the pressure distributions over the wetted surfaces of a parabolic contour in 2D and an elliptic paraboloid in 3D for oblique water impact. The pressures are calculated within the Wagner model of water …
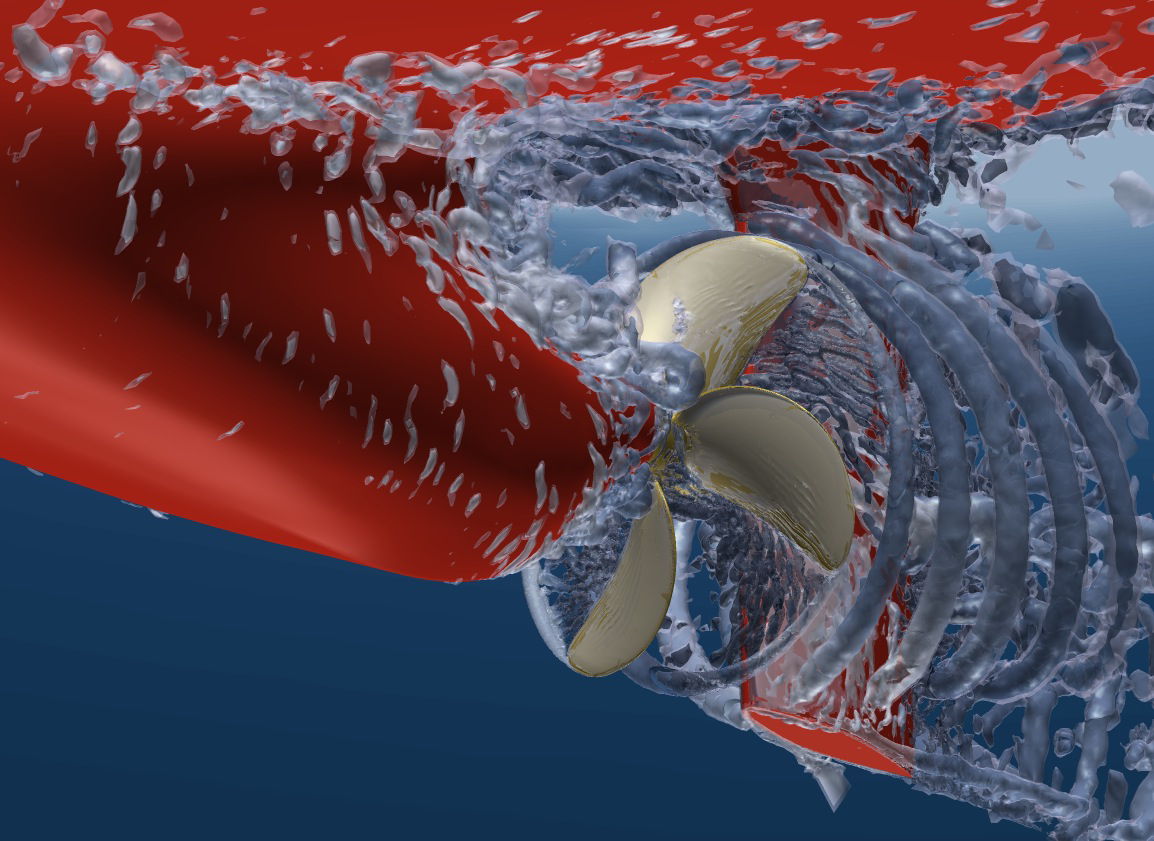
The Institute of Marine Engineering is organizing the Sixth International Symposium on Marine Propulsors (SMP’19), the sixth in a series of international symposiums, dedicated to hydrodynamics of all types of marine propulsors. SMP’19 provides a forum to present state-of-the-art research and studies on existing marine propulsors as well as a platform for introduction of new …

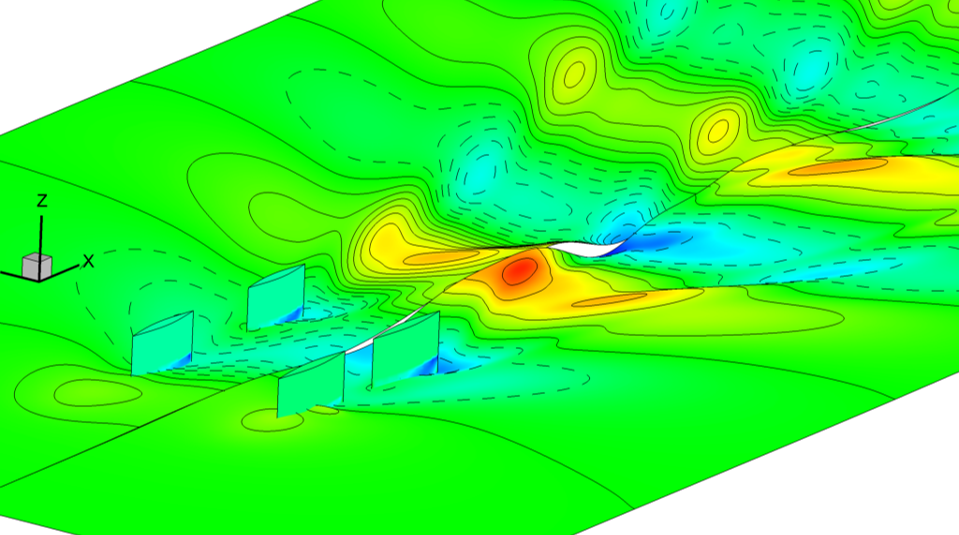
When and where Wednesday 27 March 2019, 14.30, Sala Consiglio, INM Headquarters Rome Abstract Verranno presentate due diverse applicazioni che hanno e stanno tutt’ora accrescendo la mia esperienza in ambito numerico . La prima, oggetto della mia tesi di laurea, ha riguardato lo sviluppo di una metodologia per la caratterizzazione aeroelastica di pale di elicottero …
When and where Wednesday 13 March 2019, 14.30, Sala Consiglio, INM Headquarters Rome Abstract The development and application of hybrid global/local multi-objective derivative-free algorithms are presented, for hull-form optimization in ship hydrodynamics. One well-established derivative-free global algorithm, namely particle swarm optimization (PSO), is extended to multi-objective problems and combined with derivative-free multi-objective (local) linesearch methods. …