Scope
| The continuous development of larger and with higher capabilities surface vessels market pushed the technical and the scientific interest to continuously face with off-design topics already at the very early design stage. Off design conditions are still far to be completely understood, holistically investigated and fully modeled and depicted even using very sophisticated provisional tools already developed and available. One of the main and most investigated operative off-design condition is the dynamic response of a surface vessel to the voluntary actions of a submerged moving surface. It represents one of the most restrictive and demanding design and operative requirements for a large amount of surface vessels (both merchant and military units) to be fulfilled and validated during contractual sea trials and to be verified during the operational vessel’s life. The experimental activities with self-propelled unmanned free-running maneuvering surface models are of paramount importance to directly verify the compliance with both merchant (IMO) and military (ANEP-NATO) requirements nowadays in force for surface vessels. With this in mind, by using this methodology it’s possible to test and verify systematically the dynamic response and the effectiveness of different: – control surfaces (any geometrical change) – change of position for the drift surfaces – propulsion strategies for the prime mover (constant RPM, constant torque, constant power). The related experimental activities are mainly carried out at the CNR-INM Outdoor Maneuvering Basin located on the shore of the Nemi’s lake where, mainly due to its natural volcanic topology and to the really very low ambient noise, is naturally devoted to host maneuvering tests in calm waters and also far field noise measurements on both surface and underwater dynamic platforms. |
Main characteristics
| Lake surface | Approx. 2.5 km2 |
| Availability | 24/7/365 |
| Technical equipment (maneuverability) | DGPS RT20, DGPS RTK2, Mech. Gyro, IMUs, 3D Ultrasonic Anemometer, Weather station |
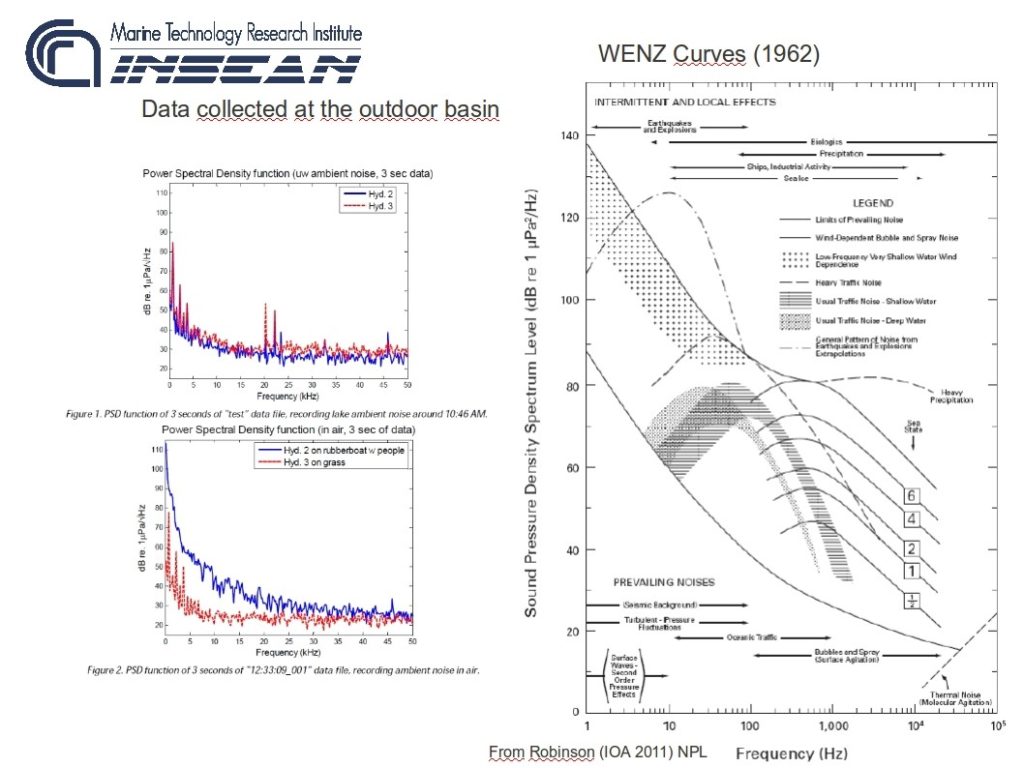
| Technical equipment (underwater noise measurement) | Digital multichannel UW noise acquisition system, projectors, reference hydrophones |
| Technical equipment (logistics) | Digital echo-sounder, RIB boats, 40m2 modular pontoon |

Contact information
| Scientific point of contact | Dr. Fabrizio Ortolani | +39 06 50299 273 |
Location
| Rome HQ outdoor branch | Via delle Navi di Tiberio 29, 00074 Nemi (RM), Italy |